系统构成:
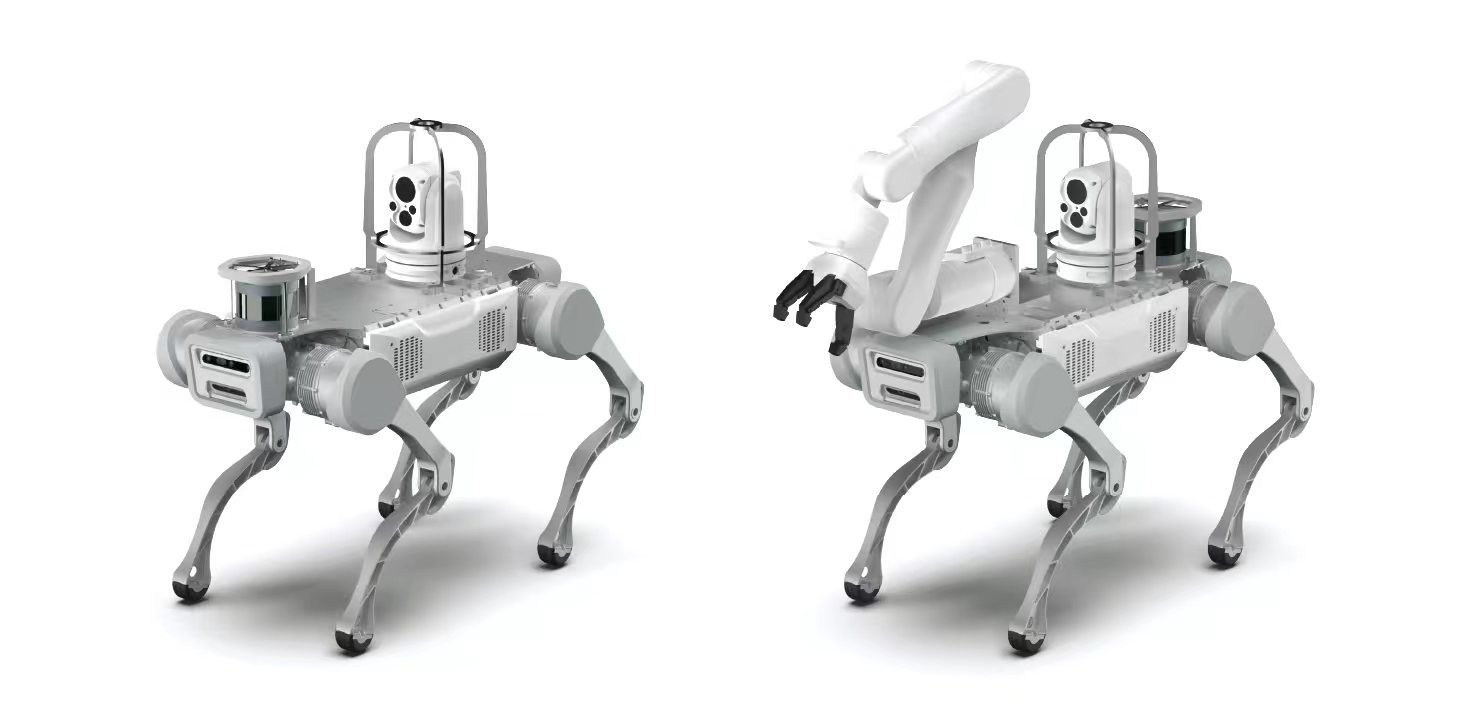
四足巡检机器人由导航系统、视觉系统、供电系统、避障系统、无线通讯系统组成,实现对洗煤厂、筛选车间的无人化巡检,实时监测环境情况及巡检范围内设备运行状态。
主要功能包括:
自主导航;图像识别;自主避障;运动方式:踏步、行走、跳跃,匍匐状态下前进,后退,走弧线,走圆形,左右横爬,抬头扭头,机身横滚、连续侧翻滚、倒地起立/倒地翻身起立;保护模式:硬急停保护、过温保护、摔倒保护;无线通讯等。
如有疑问请留言,客服会尽快联系您
如果您想要了解更多详情,请联系客服。